
 Robot Model and Training Database
Robot Model and Training Database
 Virtual Simulation Training Platform
Virtual Simulation Training Platform
 Remote Physical Machine Training Platform
Remote Physical Machine Training Platform
 SAGE Project
SAGE Project
Sim-to-Real Gap Analysis Tools
With the collected datasets from both simulation and real-robot experiments, we provide a robust Python script to automate comprehensive analysis and support an in-depth understanding of the current sim-to-real gap.
This script enables users to systematically benchmark the collected data, assess performance discrepancies, and pinpoint where simulation diverges from reality, which is an essential step for bridging the sim-to-real gap and guiding future model improvements. To run an analysis, use the following command:
To run an analysis, use the following command:
python scripts/run_analysis.py \
--robot-name h1_2 \
--motion-source amass \
--motion-names "*" \
--output-folder output \
--valid-joints-file configs/h1_2_valid_joints.txt
Outputs include:
- Excel files containing metrics such as RMSE, MAPE, correlation coefficients, and cosine similarity for quantitative comparison
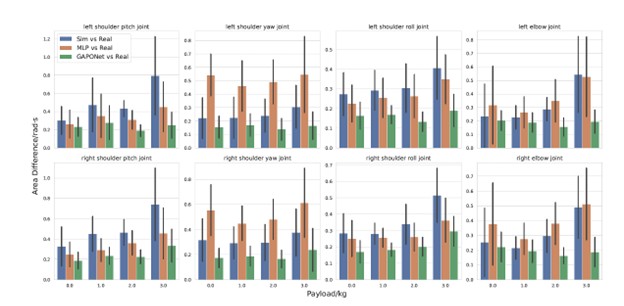
- Visualization plots illustrating joint-level differences in position, velocity, and torque
- Statistical boxplots summarizing performance differences between simulation and real-robot executions
 loading......
loading......