
 Robot Model and Training Database
Robot Model and Training Database
 Virtual Simulation Training Platform
Virtual Simulation Training Platform
 Remote Physical Machine Training Platform
Remote Physical Machine Training Platform
 SAGE Project
SAGE Project
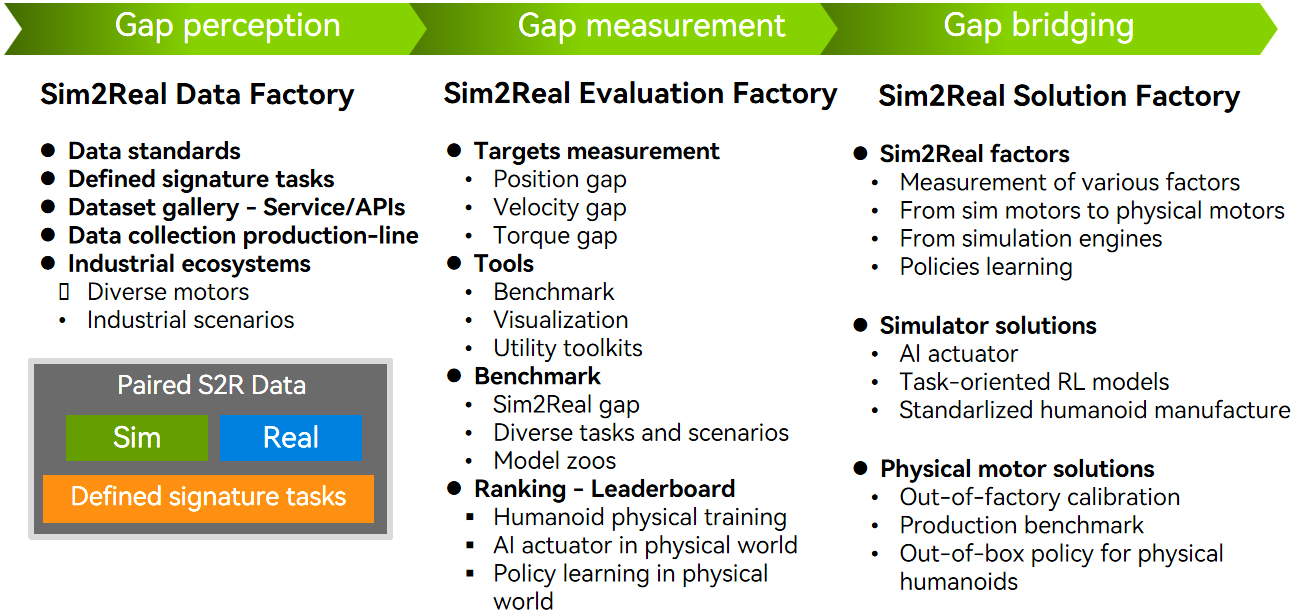
Project Landscape:
A Three-Stage Roadmap for Scalable Sim-to-Real Integration
Strategic Framework
Achieving practical sim-to-real transfer requires more than technological advances, it demands systematic infrastructure development. Our multi-year roadmap addresses this through three progressive stages that build robust foundations, establish objective measurement capabilities, and systematically eliminate performance gaps between simulation and reality.
Stage 1: Building the Data Foundation
The first stage establishes a scalable data infrastructure that serves as the backbone for all subsequent development. We will define comprehensive data standards, schemas, and taxonomies that unify collection and labeling practices across the robotics ecosystem. This includes creating canonical task definitions that enable consistent experimentation and developing a curated dataset gallery accessible through stable APIs. Our streamlined collection pipelines will encompass everything from initial data capture through quality assurance, creating an industry-wide data supply chain.
This foundation delivers a reliable "data utility" that dramatically reduces onboarding costs for new partners while enabling consistent, comparable experimentation across institutions and applications.
Stage 2: Establishing Objective Measurement
Building on our standardized data infrastructure, the second stage implements comprehensive benchmarking and evaluation systems. We will develop systematic assessment protocols for robot hardware, subsystems, and algorithms spanning perception, planning, and control domains. Our robust measurement toolchains will enable precise gap analysis and performance evaluation, providing consistent quantification of sim-to-real divergence and reliable progress tracking over time. These capabilities will generate clear, standardized benchmark reports that offer actionable insights and development priorities.
This stage produces a shared, transparent performance framework that accelerates iterative improvement and supports rigorous, data-driven innovation across the community.
Stage 3: Systematically Closing the Gap
The final stage leverages our data foundation and measurement capabilities to systematically eliminate sim-to-real performance gaps. We will enhance simulation accuracy by refining physical models, particularly for AI-driven actuators, while training reinforcement learning systems on our standardized, high-fidelity datasets guided by benchmark insights. Simultaneously, we will develop rigorous real-world calibration procedures that ensure physical robots align precisely with their simulated counterparts. Continuous improvement loops will integrate feedback from benchmarking and deployment studies to evolve simulation accuracy, calibration workflows, and training methodologies.
This comprehensive approach delivers a measurable reduction in the sim-to-real gap, transforming simulation success into reliable field performance.
Transformative Impact
This staged approach will fundamentally reshape how the robotics community approaches sim-to-real transfer. Our robust data infrastructure will empower a dynamic ecosystem of researchers and industry partners, while standardized benchmarks provide transparent performance metrics that guide development priorities. The continuous feedback between simulation and reality will enable robots that perform reliably across diverse real-world environments.
The ultimate outcome extends beyond individual projects: we will establish scalable, standardized sim-to-real pipelines that accelerate innovation, reduce development costs, and deliver consistent real-world impact. This infrastructure will become a living ecosystem—widely adopted with minimal friction, embraced by the community through shared benchmarks, and continuously improved through coordinated advances in both simulation and physical systems.
 loading......
loading......