
 Robot Model and Training Database
Robot Model and Training Database
 Virtual Simulation Training Platform
Virtual Simulation Training Platform
 Remote Physical Machine Training Platform
Remote Physical Machine Training Platform
 SAGE Project
SAGE Project
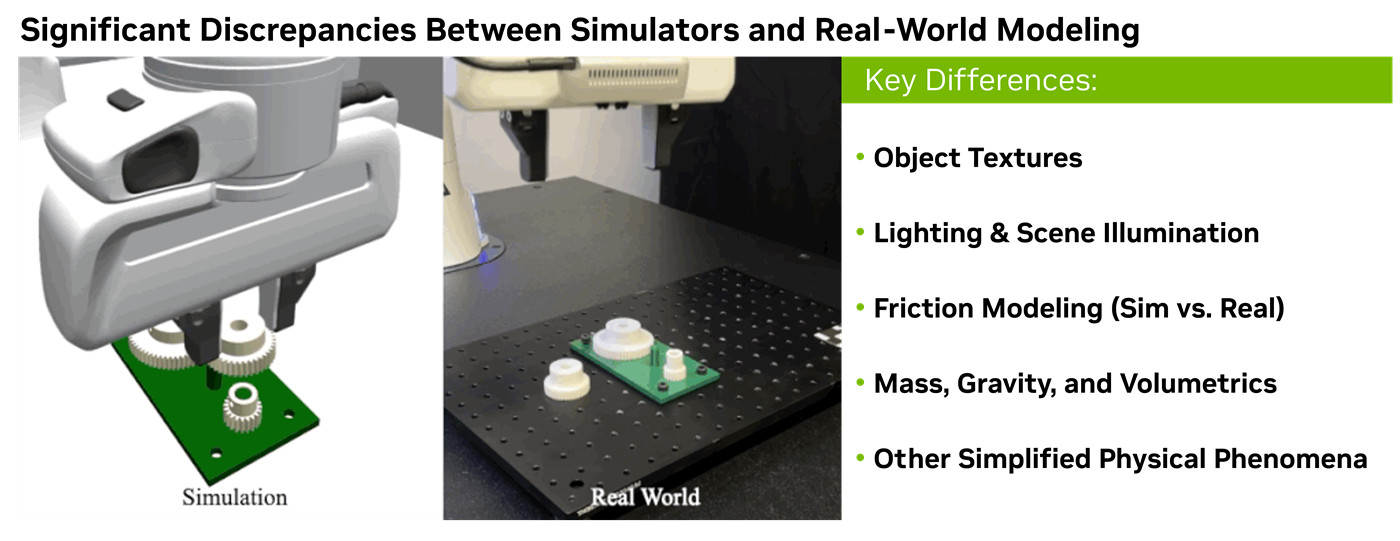
Project Motivation: Bridging the Sim-to-Real Gap in Robotics
The robotics community faces a fundamental challenge: robots that perform flawlessly in simulation often fail when deployed in real-world environments. This "reality gap" poses significant barriers to deploy autonomous systems in safety-critical applications like manufacturing, autonomous driving, and industrial automation. As demand grows for safer, more efficient robotic systems, the need for reliable sim-to-real transfer has become urgent.
Recent advances in high-fidelity physics simulation, computational power, and synthetic data generation now make it possible to train complex control policies entirely in simulation while maintaining strong physical grounding. This enables zero-shot deployment in real-world environments without extensive fine-tuning. To capitalize on these advances, Tongji University and Peking University have partnered with NVIDIA to develop a comprehensive platform that systematically closes the sim-to-real gap.
We aim to establish scalable, standardized sim-to-real pipelines that enable academic research to drive industrial innovation, setting new benchmarks for real-world robotic deployment.
Our development plan follows five key pillars. First, we will achieve high-fidelity simulation through robust modeling of contact, friction, compliance, and disturbances, all validated against real-world data. Second, we will advance actuator-level sim-to-real transfer through systematic modeling, identification, and deployment protocols that ensure consistency between simulated and physical systems. Third, we will integrate safety-aware, interpretable control by embedding safety constraints and enhancing explainability across planning, learning, and control systems. Fourth, we will establish a data flywheel that uses real-world telemetry to continuously refine both models and policies, creating a virtuous feedback loop between simulation and reality. Finally, we will develop open-source standards and benchmarks, including community-driven datasets, protocols, and evaluation suites that ensure reproducibility and align with industry best practices.
We have made significant advances in actuator-level sim-to-real transfer, successfully integrating these developments into our broader pipeline. These achievements strengthen the critical link between simulation and real-world performance, making practical deployment increasingly viable.
This platform will deliver three key benefits. It will accelerate deployment by streamlining the transition from simulation success to field-ready systems. It will enhance reliability by ensuring robust performance under disturbances, varying loads, and challenging conditions. And it will enable reproducibility at scale through standardized benchmarks and toolchains that transfer seamlessly across laboratories and manufacturing environments.
Led by Tongji University in partnership with Peking University and NVIDIA, this initiative leverages deep academic expertise alongside industry-leading resources. Over the next five years, we will expand engagement with leading academic institutions and industrial partners, transforming sim-to-real transfer into an open-source, community-driven ecosystem that sets new standards for real-world robotics applications.
 loading......
loading......